



























 最近发布的点设计对于部分手部和手指截肢者来说,棘轮状手指是一种具有高科技金属外观的坚固、清晰的假肢手指。它们通常安装在一个碳纤维外壳上,内部有一个柔软的硅胶插座,最多可以替换单只手的四根手指。用户通过将指尖压在一个坚固的表面上,使其达到特定对象或任务所需的屈曲程度来定位点数字。指尖可以与定制的硅胶修复相结合,这样它们的外观和移动就像真正的皮肤一样——手指关节可以平滑弯曲。
最近发布的点设计对于部分手部和手指截肢者来说,棘轮状手指是一种具有高科技金属外观的坚固、清晰的假肢手指。它们通常安装在一个碳纤维外壳上,内部有一个柔软的硅胶插座,最多可以替换单只手的四根手指。用户通过将指尖压在一个坚固的表面上,使其达到特定对象或任务所需的屈曲程度来定位点数字。指尖可以与定制的硅胶修复相结合,这样它们的外观和移动就像真正的皮肤一样——手指关节可以平滑弯曲。
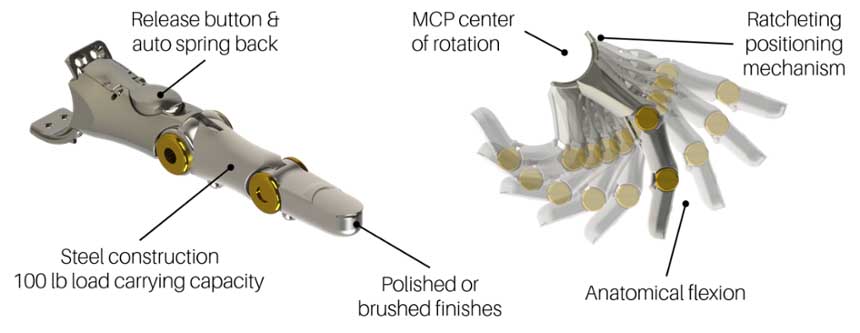
泰坦手指是另一种被动技术,它可以让部分或完全失去手指的人更容易握住或携带东西,只需手动将该设备的关节定位到所需的屈曲水平。Titan非常耐用,并且有各种尺寸以满足每个患者的需求。
的Griplock Finger™是裸体假肢MCP关节近端截肢的完美解决方案。耐用的尼龙整流罩和硅胶垫提供无缝美观和提高抓握稳定性,同时也防止刮伤敏感表面和对象处理用户。GripLock Finger™结构是加工铝和热处理和表面硬化不锈钢的组合。


















动态的胳膊肘部
 动态的肘部假体采用强大的电动机与VARIO驱动离合器组合使用,以帮助弯曲和伸长弯头的延伸,并且可以保持高达11磅。它与传感器速度假手对成对,并具有自动前臂平衡系统,使能量施加并使得拍照看起来更加自然。
动态的肘部假体采用强大的电动机与VARIO驱动离合器组合使用,以帮助弯曲和伸长弯头的延伸,并且可以保持高达11磅。它与传感器速度假手对成对,并具有自动前臂平衡系统,使能量施加并使得拍照看起来更加自然。







